一、团队简介
98858vip威尼斯登录水下作业技术与装备“兴海”学术团队集科研、教学、生产、应用于一体,自上世纪70年代起面向国家海洋能源工程与国防军事为需求,在国家深远海勘探与开发、水下作业、海军救捞、特种作业、仿生作业等方面进行深入研究的综合实验研究团队。2004年由中国工程院院士徐玉如教授牵头组建了水下作业技术与装备黑龙江省重点实验室。近20年来,团队在王立权教授的带领下,重点开展水下生产系统装备、水下生产设施连接技术、大深度水下密封技术、深海作业技术与装备、海洋仿生机器人技术、救捞作业与装备、水下对接技术、海上风电装备及特种装备等的研究与开发工作。团队与中海石油研究总院有限责任公司、中海石油海洋石油工程股份有限公司、中船重工昆明船舶设备研究试验中心、中船重工第七0五研究所、中广核中科华核电技术研究院等多家生产科研单位,以及CCS、DNV船级社,国内外海洋能源开采、水下机器人技术知名大学均有良好合作,共同开展科学项目研究。
团队先后承担国家专项子项目5项、国家重大项目子项目5项、国家自然科学基金项目10项、民用船舶项目13项、创新专项项目2项、国家重点研发计划4项、国家重点实验室开放课题3项、研究项目28项、黑龙江省自然科学基金重点和攻关项目8项、企业合作项目76项。
科研成果获省级科学技术一等奖3项、二等奖3项、三等奖4项;科技进步一等奖1项、二等奖2项、三等奖2项;国家能源科技进步二等奖2项;海洋工程科学技术二等奖2项;船舶与海洋工程专利奖1项。指导研究生获大学生科技创新类竞赛特等奖1项、一等奖6项、二等奖6项;三等奖3项。
作为省级科技创新团队,目前拥有专任教师11人,其中教授4人,副教授7人,专职科研人员4人。在读硕博研究生100余人。
二、研究方向
1.海洋工程装备相关技术
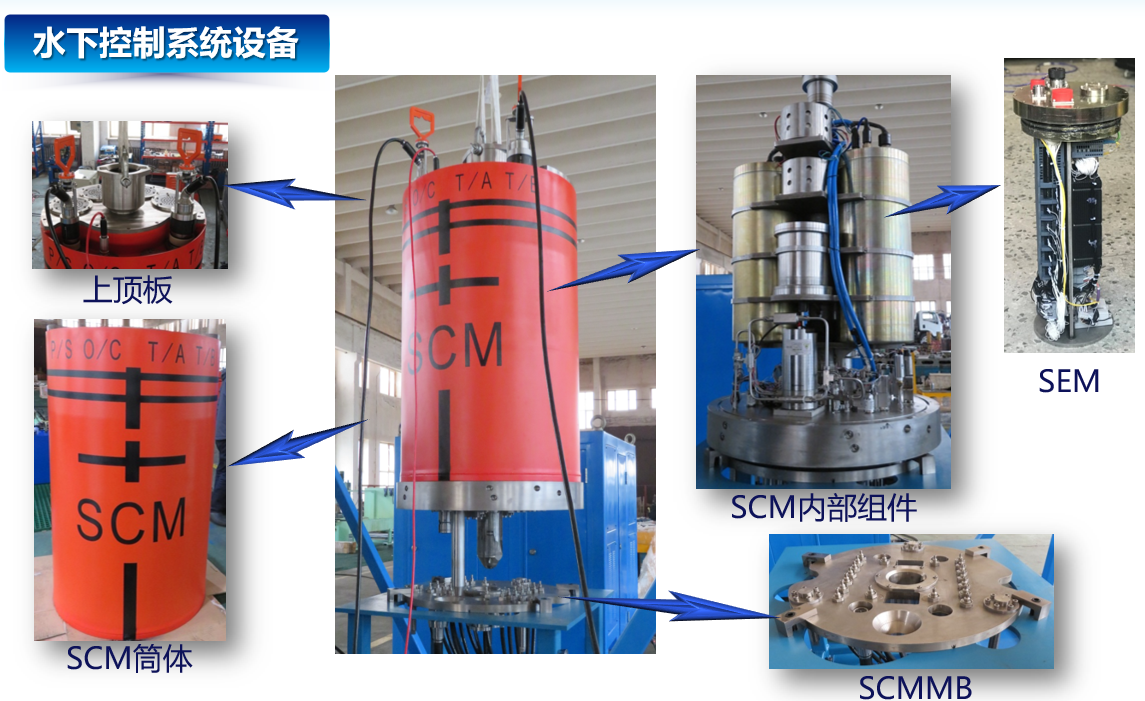
(1)水下控制系统
面向海洋油气资源开采国产化核心技术突破,在水下控制系统核心装备——水下控制模块方面开展研究。水下控制模块通过控制水下采油树上的各个阀门,监控采油树的状态,及时向海面上的设备反馈海底设备信息,协调水面生产平台与水下生产系统的工作。现已研制出工程化应用的电液复合式水下控制模块(SCM)和全电式水下控制模块(SEM)。
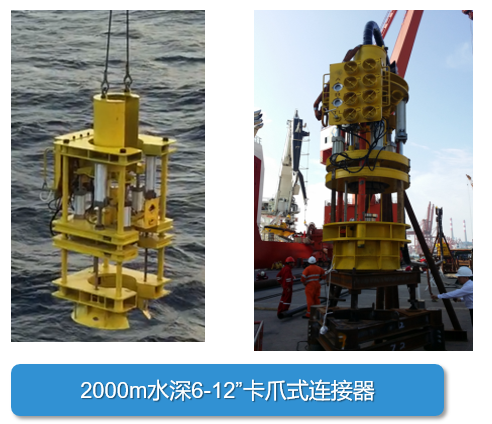
(2)水下生产设施连接技术
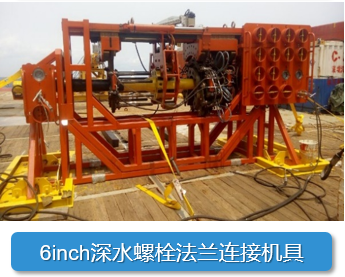
针对海洋油气开采装备中采油树、管汇、跨接管、立管等各装备的不用工作环境与连接方式,研制了深水卡压式连接器、卡爪式连接器、卡箍式连接器、螺栓法兰连接器等。研究了大深度条件下接触式密封的机理与方法,提出了一套完整的理论分析与数值模拟方法,并完成实验验证。
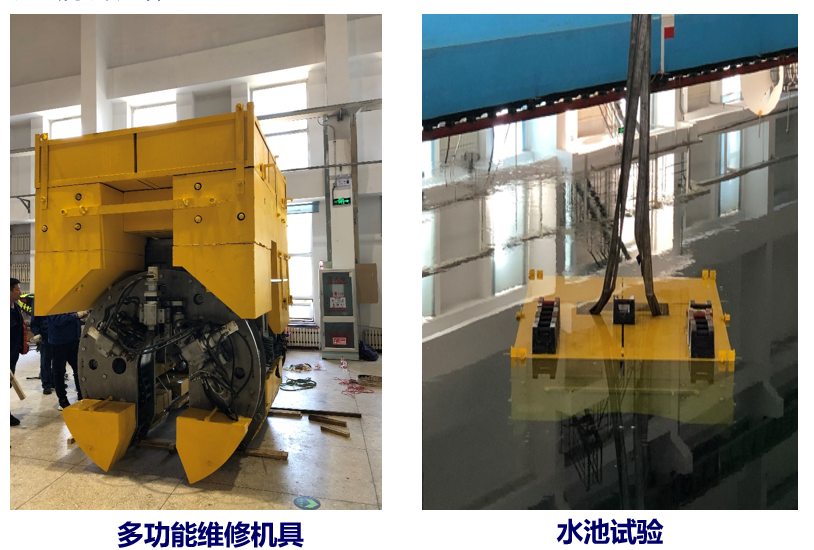
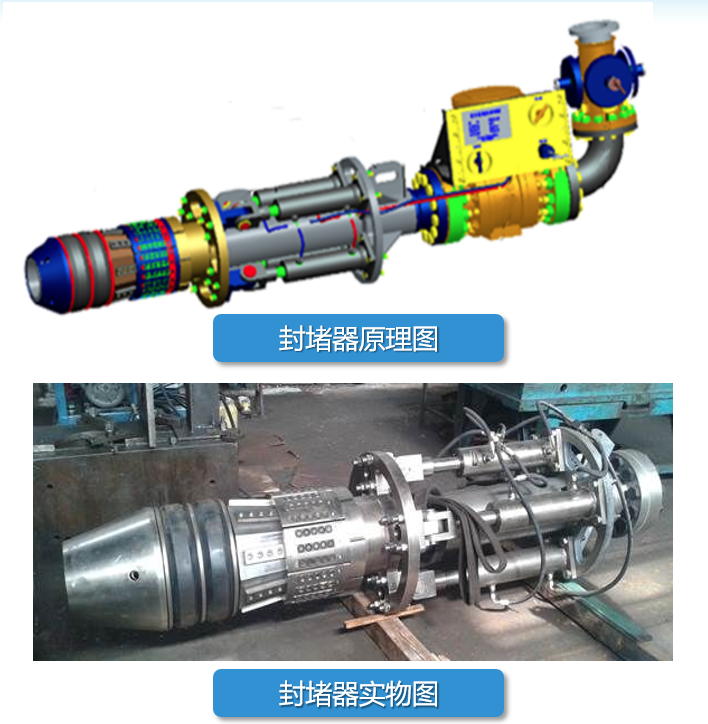
(3)水下应急维修技术
针对海洋油气生产系统中管道破坏导致原油泄漏污染问题,提出了一套完成了应急维修实施策略,对金刚石绳锯切削海管效率、油气介质管道内橡胶密封等科学问题开展了深入研究。研制了用于解决油气管道破坏泄漏污染的紧急控制、应急维修、快速复产等需求的一系列原理样机和装置,如海底管道封堵器、控油罩、水下金刚石绳锯机等。
(4)海上平台安装与海底管道铺设技术
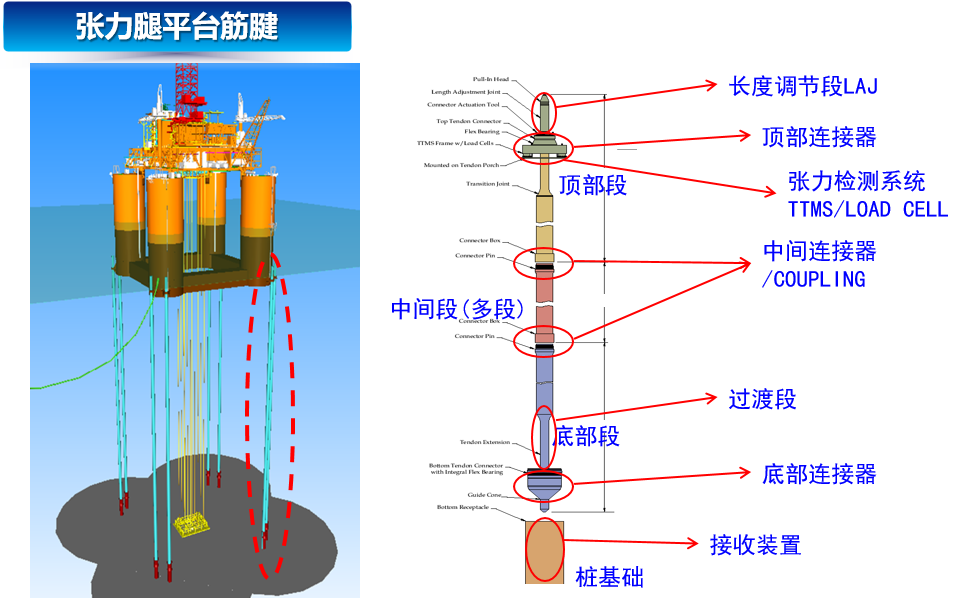
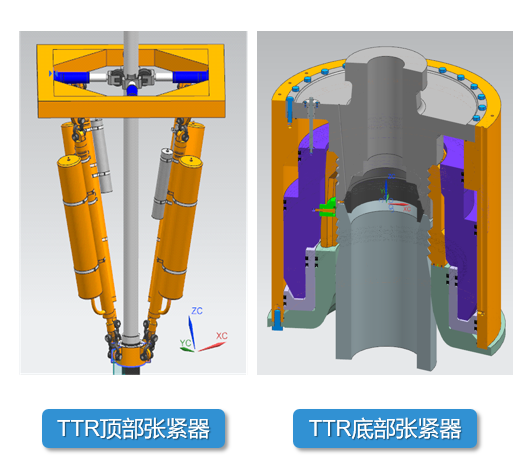
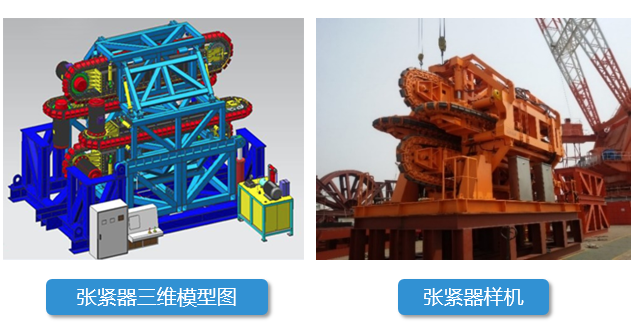
针对张力腿平台筋腱连接问题,提出了顶部、底部连接器及临时浮力装置设计方案,完成了适用于TLP平台张紧立管的连接装置及张紧器设计制造。针对海上平台桩基施工,设计了内胀式吊桩器、单/双边吊桩器、钢桩翻转器、夹桩器、调平器、悬跨处理装置、海缆拖拉辅助装置等导管桩作业装备。针对海洋油气管道铺设问题,依托Reel-lay管道铺设系统,设计了管道张紧器、软管滚筒驱动装置、钢管组对机。在海底管道铺设工作中,提出了犁式挖沟机、射流式挖沟机、回填犁等作业装备设计方案。
2.水下机器人技术
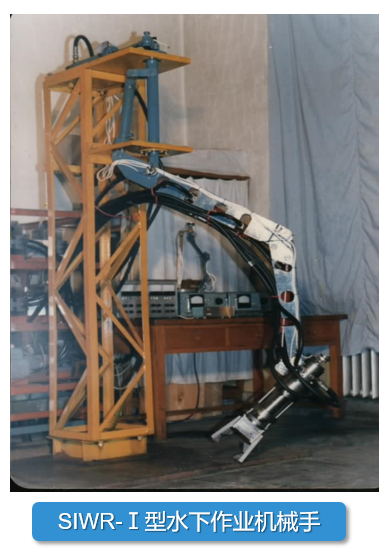
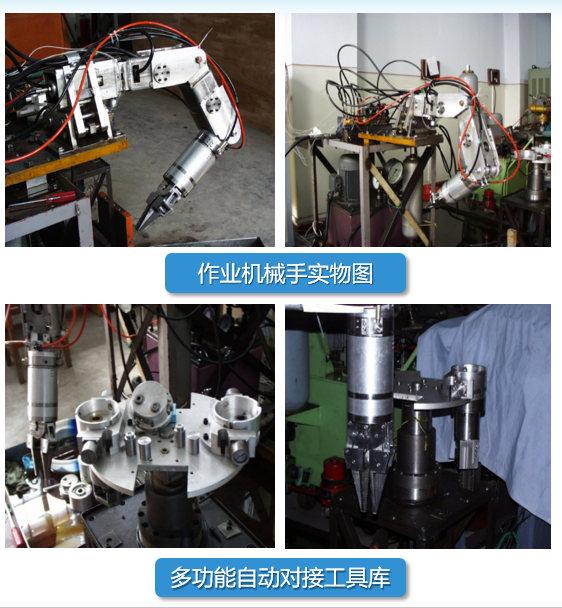
(1)水下作业机械手
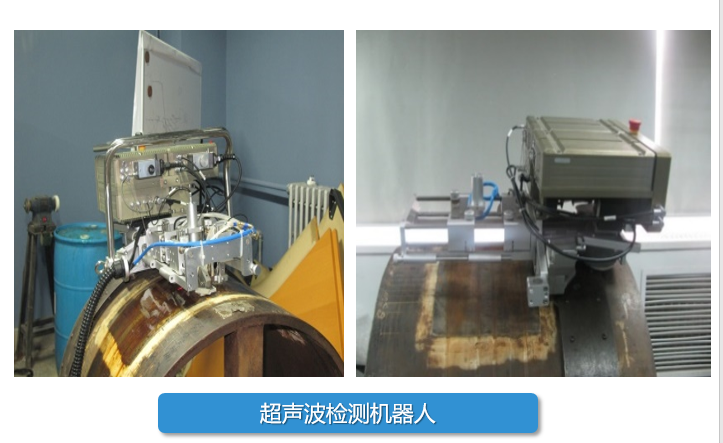
针对水下作业的特殊环境,研制了五、六自由度水下作业机械手,可同时携带多把水下作业工具,通过电液伺服控制实现自主更换工具的功能。在海底管道铺设、检修作业中,针对管道内异物抓取、管道焊缝检测研究了不同抓取方案以及超声波检测方法。
(2)水下机械臂
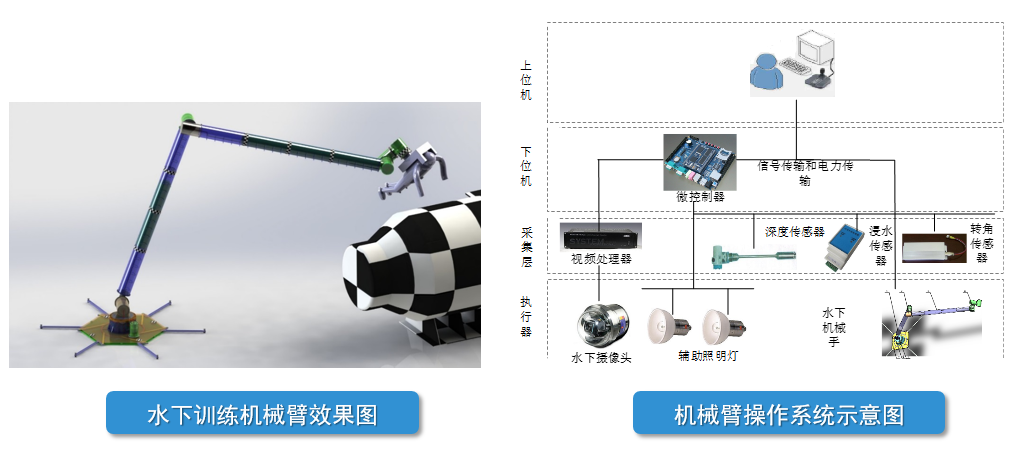
针对失重环境,采取水下模拟方法对空间六自由度大型机械臂工作环境进行模拟。在电机负载、关节密封、精度控制、失重配平状态等主要指标上完成了空间状态的水下模拟,达到了技术指标要求。
(3)特种机器人
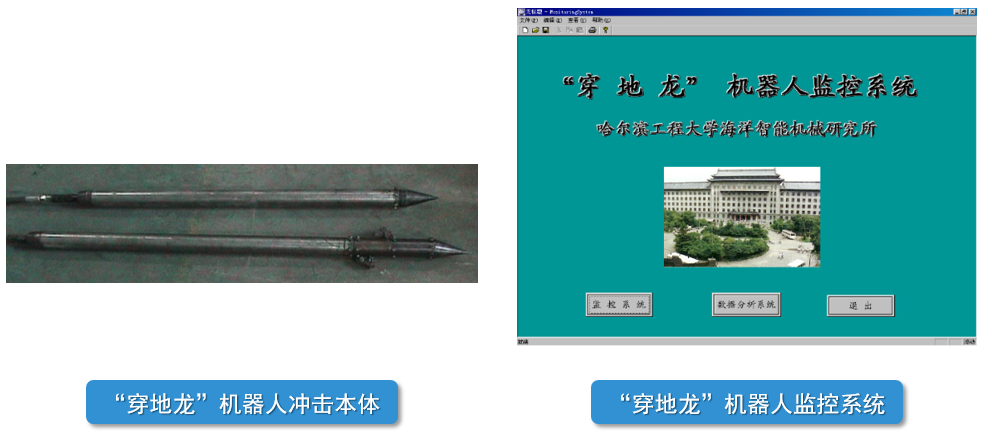
面向海洋平台钢桩、船体表面维护、管径无开挖式铺设等方面,研制了履带式、磁吸式等多种移动方式的清刷机器人,在不影响平台工作、船体停泊的情况下,去除表面附着的贝类、锈皮等杂质。基于蠕动原理,采用冲击爬行方式在土壤中进行穿孔作业,实现电缆、光缆等管线的地下非开挖铺设。
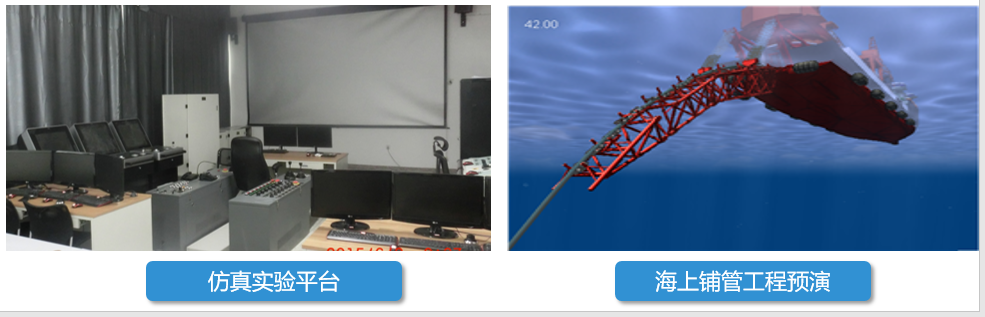
3.水下作业视景仿真技术
采集实时监测数据,完成数学模型的实时解算,通过三维视景技术构建并展示实际船舶的运动姿态,用以实现铺管、起重作业的工程预演和人员陆地培训。
水下控制系统:针对水下控制系统主要核心技术和装备制造技术“卡脖子”问题,研制出国内首套用于水下生产设施的2000米级电液复合式水下控制系统关键装备,并在深圳完成了码头下放试验及高压舱试验;研制出国内首套500米级全电式水下控制模块关键装备,填补了我国在全电式水下生产系统领域的技术空白。研制的2000米级电液复合式水下控制系统关键装备在控制压力等级、冗余功能、通讯方式、传感器接口等关键指标方面基本达到了与国外产品同等的水平,在SEM性能、集成阀块设计等关键指标方面超越了部分国外产品,打破了国外的技术垄断,拥有了自主知识产权;研制的500米级全电式水下控制模块关键装备在供电电压、控制/传感功能路数、水深、驱动功率、保持功能、失效安全关断控制功能等关键指标方面已基本达到了与国外产品同等的水平,标志着我国已缩小了与国外在全电式水下生产系统领域的技术差距,为未来全电式水下控制系统进一步国产化奠定基础,对未来我国实现全电式水下生产系统技术的弯道超车具有重大意义。
完成民用船舶课题4项,国家重点研发计划2项,横向课题3项,发表SCI/EI检索学术论文12篇,授权发明专利13项。

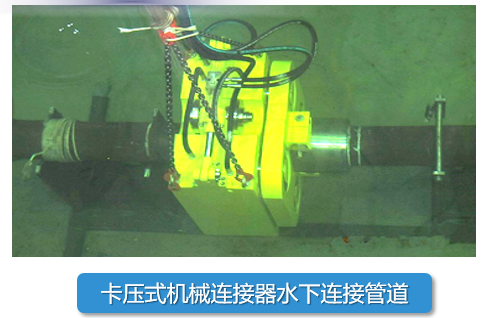
水下生产设施连接技术方向:在该领域多次打破国外垄断,填补国内空白;研制出世界首台用于海底管道连接的卡压式机械连接器、海上平台管道连接卡压式机械连接器和配套连接工具,已通过中国船级社CCS认证;发明了国内首台连接精度高、密封性强、适用水深3000m的系列深海油气田水下生产系统连接装备,并通过中国船级社CCS认证:深水卡爪式自动连接器具有连接、拆卸、密封圈更换及在线测试的功能,深水卡箍式自动连接器具有缓冲就位、自定心的功能,深水法兰自动连接机具具有螺栓孔对正、20个螺栓同步引入及分步张紧的功能;在接触式静密封机理等基础科学问题方面开展了深入的研究,建立了一整套系统的理论研究方法和数值仿真技术,在陆地实验、海试方面积累了丰富的经验。在该方向发表学术论文50余篇,其中SCI检索20余篇;授权发明专利40余项;指导研究生参加“杰瑞杯”中国研究生能源装备创新设计大赛,获得特等奖1项、一等奖2项、三等奖1项;以该成果为核心的“深水管道连接技术研究及装备研制”获得2016年黑龙江省科学技术奖(发明类)一等奖。
研制的深水水平卡箍式连接器,是国内首台实际应用并进行挪威船级社(DNV)认证的国产化深水水平式连接器,解决了深水水平连接的“卡脖子”技术,于2022年在我国南海乐东22-1油气田进行国内首例国产化连接器的工程应用。标志着我国掌握了深海油气田水下生产系统连接装备设计、制造、测试及海上安装能力,使我国成为世界上少数几个掌握该项技术的国家之一。
完成国家重大项目子项目2项,民用船舶课题3项,国家自然科学基金3项,黑龙江省自然科学基金1项,横向课题4项,发表SCI/EI/核心期刊论文56篇,授权发明专利41项。








深水应急维修作业技术方向:研制了国内首台水下金刚石绳锯机、水下多功能作业机具、潜水员水下作业系列工具等,填补了国内水下大型管道在安装、检测、维修作业技术方面的空白,实现我国深海工程管道切割技术从无到有并跨入世界先进行列的重大突破。完成国家自然科学基金面上项目1项,开发实验室基金项目1项,累计发表论文30余篇,其中SCI期刊论文10余篇,授权发明专利20余项。


海底管道铺设方向:研制了国内首台能够达到工程化应用的海底管道犁式挖沟机试验样机,根据渤海、南海及国内其他海域水下环境条件,适用于硬质粘土挖沟;研制了国内首台深水柔性管道铺设系统试验样机,打破该项技术为国外公司所垄断的局面;研制了“海洋工程201船”视景仿真作业系统,将先进的虚拟仿真技术引入到复杂的海洋工程作业培训中,在陆地环境中以虚拟培训方式部分或全部代替实船培训,改变了传统的作业培训方式,投入少,见效快,将大大提升作业能力,降低工程成本。该成果加快了我国海底管道铺设装备的国产化、工程化速度。完成国家科技重大专项子项目2项、黑龙江省科技攻关项目1项,横向课题5项,发表SCI/EI/核心期刊论文11篇,授权发明专利4项。


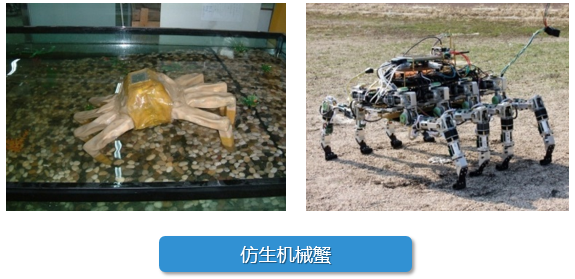
水下作业机器人方向:针对水下船体表面生物体附着和锈蚀、两栖环境探测等问题,研制了船体表面清刷机器人、仿生机械蟹。清刷机器人主要用于清刷船体表面附着的贝类、锈皮和锈斑等,可以降低燃油消耗,延长船舶的使用寿命。两栖多足仿生机械蟹具有地形适应性好、运动平稳、低能耗、高效率等优势。对船体表面锈蚀和生物体去除机理、跨介质多足仿生机械蟹步态等问题开展了一系列研究工作。研制的两栖多足仿生机器人通过了黑龙江省机械工业联合会组织的鉴定,鉴定委员会一致认为本项目组研制的两栖多足仿生机器人整体技术指标已达到先进水平。在两栖多足仿生机器人密封技术、复杂地形的自适应方法、两栖多足仿生机器人步态切换方法、多机器人协调技术和柔顺性控制方法等方面具有核心技术,这些技术为未来的研究奠定了相关理论基础和应用经验。近年来项目组针对水下特定环境开展了两栖仿生多足机器人水下双游泳桨耦合推进研究。通过生物观察分析,在动力学模型创建、水动力学分析、推进机构设计、模拟环境试验、浅滩环境试验等多个方面开展了大量的研究工作。针对失重环境,采用水下模拟方式的六自由度机械手,结合国内某单位航天员训练水槽的实际情况,设计开发一个10m长的六自由度机械臂来辅助航天员进行训练,并根据所要求的作业环境对其结构和电机负载、密封等进行分析,保证该技术应用过程中的可靠性。
团队研制了核电蒸汽发生器一次侧检修机器人、核电检测推拔器工程样机、器械护士机器人系统、水下6自由度焊接机器手、海洋零浮力综合无损检测运载平台、失重模拟下的水下机械臂等装备完成国家自然科学基金2项、航天科研项目1项、黑龙江省自然科学基金2项、黑龙江省科技攻关项目1项、横向课题3项,发表论文62篇,授权发明专利16项。



水下作业视景仿真方向:深水起重铺管船视景仿真系统是针对“海洋石油201”深水铺管起重船开发的仿真模拟系统。系统采集实时监测数据,完成数学模型的实时解算,通过三维视景技术构建并展示实际船舶的运动姿态,可以实现铺管、起重作业的工程预演和人员培训。完成国家专项子项目1项,发表论文7篇。

四、团队文化
水下作业技术与装备黑龙江省重点实验室团队坚持党的领导,坚持社会主义办学方向,坚持把立德树人作为根本任务,努力提高自身科研、学术、教学水平。通过建立健全人才培养机制,创造良好的教师成长环境和研究生培养模式,广纳人才,提高团队凝聚力;通过共享资源,使团队成员更多地参与到服务国家战略、提升关键领域科研水平的工作中来,促进团队成员不断提高自身素质,加快杰出青年人才快速成长;通过建立无间隙沟通渠道,使团队成员具有共同的认同感、归属感、成就感和责任感,更好地激发和释放团队合作潜能。

五、团队主要成员